Ubuntu 23.10 SSH パスワードログインの有効化
# To disable tunneled clear text passwords, change to no here! PasswordAuthentication yes
# Change to yes to enable challenge-response passwords (beware issues with # some PAM modules and threads) KbdInteractiveAuthentication yes
adb で DoCoMo スマホのクソアプリを葬るメモ
探せばいくらでも出てきますが、ここでは主にコマンドのメモを。
リスクもありますので、しっかり理解したうえ自己責任でどうぞ。
USBデバッグを有効化
デバイス情報のビルド番号を連打して開発者向けオプションを表示すればスイッチがある- PC と接続して、表示されたメッセージでUSBデバッグを
許可する adb devicesでデバイスを表示xxxxxxxxxxxx deviceの表示を確認
アプリのパッケージ名を調べる
このアプリが便利だけど、これだけだと削除コマンド実行に手打ちが必要。 play.google.com
またはこちら。これならコピペ可能。併用するといいんじゃないかな。
adb shell pm list packages
アプリ削除
set app=com.nttdocomo.android.applicationmanager adb uninstall %app% adb shell pm uninstall -k --user 0 %app%
adb uninstallしてやりたいが、だいたいは[DELETE_FAILED_INTERNAL_ERROR]で失敗するadb shell pm uninstallは基本的に成功する
[DELETE_FAILED_DEVICE_POLICY_MANAGER]
- 機器管理アプリに設定されている場合に発生
- Android 設定で機器管理アプリから外してやればOK
Azure Blob Container に SAS でファイルをアップロード
コンテナーの SAS Token を生成する
コンテナー SAS に「作成」のアクセス許可を与えておきます。そうすると、コンテナーの中に直接 Blob をアップロードが可能です。

アップロート(Powershell サンプル)
$file = "<LocalFilePath>"
$storageAccount = "<Account>"
$container = "<Container>"
$fileName = New-Guid
$sas = "sp=rc&st=2022-09-01T14:15:32Z&se=2022-09-03T22:15:32Z&spr=https&sv=2021-06-08&sr=c&sig=SyULDzZ1sZAT%2FKH5a%2****************************%3D"
$headers = @{ 'x-ms-blob-type' = "BlockBlob" }
$upload = "https://${storageAccount}.blob.core.windows.net/${container}/${fileName}?${sas}"
Invoke-RestMethod -Uri "${upload}" -Method Put -Headers ${headers} -InFile ${file}
Raspberry Pi + Ubuntu + .NET Core で GPIO「Part3 PWM ファンコントロール」
使用機材や環境設定などは以前の記事をご参照ください。
ファンの仕様については以下を参照しています。
実験に使用しているファンは自作 PC 用のものです。PWM 対応(4Pin)のものならなんでも OK だと思います。
回転数を読み取る
基本ファン仕様
オープンコレクタで、3番ピンが Sensor です。GND は共有です。

入力回路
回路図

Sensor ピンをプルアップして使います。
- ここでは 12V (電源電圧)にプルアップしています。
- 仕様によるとファン内のトランジスタに流せる電流 Ic は 10mA 以下となっているので、プルアップ抵抗は最低でも 1200Ω 必要です。
- Raspberry Pi 側の 3.3V でプルアップしてもよく、その際は MOSFET を介さず GPIO にそのまま接続できそうです。しかし、ファン側の実装がおかしかった場合には GPIO を破壊されかねないので MOSFET で回路を分けました。
- GPIO 側は Raspberry Pi の 3.3V 系で構成します。
波形観測

- 上(黄色):GPIO 端子
- MOSFET を通しているので信号は反転しますが、パスルを数えるだけなので問題ありません。
- 綺麗に 0V-3.3V の波形になっています。
- 下(水色):Sensor 端子
- ファンが出力している信号を観測しているものです。
- 綺麗に 0V-12V の波形になっています。
コード実装と結果
コード実装
依存ライブラリは以下のとおり。
パスルのデコード
- ファンから出力されるパルス信号は 1 回転に 2 つとの事です。
- 30 倍にすれば RPM にできます。
const int pin = 19; Console.WriteLine("Pulse scan."); using var controller = new GpioController(); controller.OpenPin(pin, PinMode.InputPullUp); using var pulseStream = new Subject<Unit>(); controller.RegisterCallbackForPinValueChangedEvent( pin, PinEventTypes.Rising, (sender, args) => { pulseStream.OnNext(Unit.Default); }); using var subscribe = pulseStream.Buffer(TimeSpan.FromSeconds(1)) .Subscribe(list => { Console.WriteLine($"[{DateTime.Now:HH:mm:ss.fff]} {list.Count} counts/Sec. {list.Count / 2} RPS. {list.Count * 60 / 2} RPM."); }); Console.WriteLine($"Press <Enter> to exit."); Console.ReadLine(); controller.ClosePin(pin); Console.WriteLine("exit.");
出力結果
ここで使用したファンは 2800 RPM の製品なので、正しく計測できているでしょう。
[15:55:49.420] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:50.421] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:51.422] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:52.422] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:53.423] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:54.424] 94 counts/Sec. 47 RPS. 2820 RPM. [15:55:55.420] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:56.421] 92 counts/Sec. 46 RPS. 2760 RPM. [15:55:57.421] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:58.422] 93 counts/Sec. 46 RPS. 2790 RPM. [15:55:59.422] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:00.423] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:01.423] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:02.424] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:03.420] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:04.421] 92 counts/Sec. 46 RPS. 2760 RPM. [15:56:05.421] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:06.422] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:07.422] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:08.419] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:09.420] 94 counts/Sec. 47 RPS. 2820 RPM. [15:56:10.420] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:11.417] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:12.421] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:13.420] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:14.420] 94 counts/Sec. 47 RPS. 2820 RPM. [15:56:15.420] 93 counts/Sec. 46 RPS. 2790 RPM. [15:56:16.421] 92 counts/Sec. 46 RPS. 2760 RPM.
PWM 制御
基本ファン仕様

PWM 端子は ファン内部で 5V になるように調整されているそうです。
- オープン状態にすれば Duty 比 100% と同じ波形になります。3 ピンの M/B 端子に接続した際に PWM 端子が未接続となり 100% 回転になるのも同じことです。
- GND に接続すれば Duty 比 0% の波形になります。
- その他の割合はパルス信号の Duty 比によって制御します。
- 周波数は 25KHz です。
制御回路と波形観測

やり方は以下の 2 つ考えられますが、それぞれ PWM 端子の波形はこのようになりました。いずれもファンコントロールには成功しています。
① MOSFET で PWM 端子を GND にスイッチングする
回路図の橙枠 5V 供給部分がないパターン
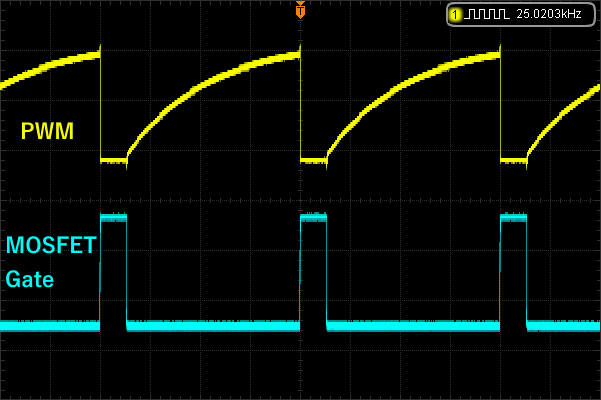
MOSFET が OFF になった直後から 5V に向けての立ち上がりが遅いようです。ファン側の 5V 電力が不足している?
② 5V の PWM パルス信号を生成して送信する
回路図の橙枠 5V 供給があるパターン
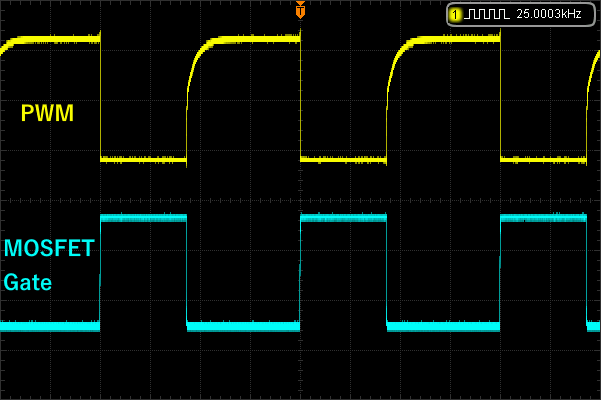
Raspberry Pi 側の 5V を利用して PWM 端子への電力供給ができるので、立ち上がりが改善しています。入力ラインの抵抗値を下げることで、さらに立ち上がりを改善することもできます。
※100Ωに換装した例 (やる場合は消費電力に注意)

コードと結果
コード実装
PWM 信号を出力する実装は以前の記事を参照してください。
MOSFET によって波形は反転し Duty 比も逆転してしまうので、これはコード実装で解決します。
出力結果
Duty 比を変化させながら、同時に回転数も取得してみました。

ANYCUBIC Vyper XY限界サイズをプリントするための設定
結論


X247.0, Y247.0
ノズルオフセット X-3.5, Y-6.0 でうまくいきます。
Z は 260.0 でいいんじゃないでしょうか。そんなに背が高いものを作らないので、Zについては詰めません。
テスト用モデル
www.thingiverse.com これを Cura でリサイズして使います。
カタログスペック

 ※ 画像はAmazonより引用(不要部分は編集でカット済)
※ 画像はAmazonより引用(不要部分は編集でカット済)
X245, Y245 です。
スライス
最大サイズのスライスを行うには、プリンタ設定はちょっとだけ大きめにする必要があります。 細かくは Kobra で試した 別記事 を参照ください。
ノズルオフセット
ノズルオフセットなし
Kobra では必要なかった設定ですが、ノズルオフセットなしの場合はこのようにギリギリです。というか、ちょっとはみ出てました。

ノズルオフセット値
何パターンがプリントしながら最適値を探りました。ノズルオフセット X-3.5, Y-6.0 で以下のとおりイイカンジになりました。

Raspberry Pi + Ubuntu + .NET Core で GPIO「Part2 Hardware PWM」
Hardware PWM を有効化する
H/W 仕様
Raspberry Pi には Hardware PWM が搭載されています。 pinout.xyz
ただし、OS のデフォルトでは GPIO として機能するようになっているので、設定を行わないと Hardware PWM としては動作しません。
設定パターン
基本ルールはこれです。
- Hardware PWM は合計2基搭載されていて、1基ずつ有効化できる
- PWM0 は GPIO の 12
物理32または 13物理33に割り当てできる - PWM1 は GPIO の 18
物理12または 19物理35に割り当てできる
以下に詳しく解説されているので、一部を引用・転記しておきます。
iot/raspi-pwm.md at main · dotnet/iot · GitHub
Activating only 1 channel
PWM GPIO Function Alt dtoverlay PWM0 12 4 Alt0 dtoverlay=pwm,pin=12,func=4 PWM0 18 2 Alt5 dtoverlay=pwm,pin=18,func=2 PWM1 13 4 Alt0 dtoverlay=pwm,pin=13,func=4 PWM1 19 2 Alt5 dtoverlay=pwm,pin=19,func=2 Activating 2 channels
PWM0 PWM0 GPIO PWM0 Function PWM0 Alt PWM1 PWM1 GPIO PWM1 Function PWM1 Alt dtoverlay PWM0 12 4 Alt0 PWM1 13 4 Alt0 dtoverlay=pwm-2chan,pin=12,func=4,pin2=13,func2=4 PWM0 18 2 Alt5 PWM1 13 4 Alt0 dtoverlay=pwm-2chan,pin=18,func=2,pin2=13,func2=4 PWM0 12 4 Alt0 PWM1 19 2 Alt5 dtoverlay=pwm-2chan,pin=12,func=4,pin2=19,func2=2 PWM0 18 2 Alt5 PWM1 19 2 Alt5 dtoverlay=pwm-2chan,pin=18,func=2,pin2=19,func2=2
設定方法
上記の表の中から有効化したい組み合わせを1つ選び /boot/firmware/config.txt に dtoverlay を書き加えます。上記で紹介しているサイトでは config.txt のパスが違いますが Ubuntu ではこっちのパスでした。
$ sudo vi /boot/firmware/config.txt
最終行に [all] があったので、その下に書き加えました。
...省略... [all] dtoverlay=pwm,pin=12,func=4
再起動して設定を反映します。
sudo reboot
動作確認
GPIO 制御ライブラリとしてはこれを利用します。
NuGet Gallery | Iot.Device.Bindings 2.1.0
実装はこのようなかんじ。
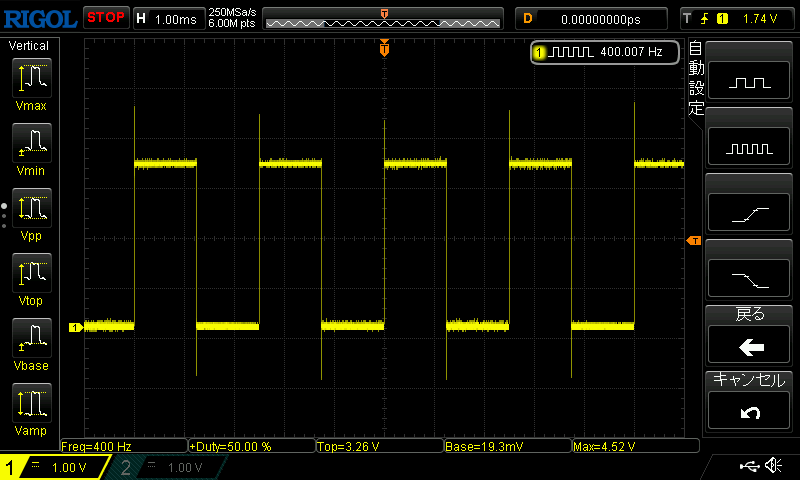
using System.Device.Pwm; Console.WriteLine("PWM. Press <Enter> to exit."); using var pwm = PwmChannel.Create(chip: 0, channel: 0, frequency: 400, dutyCyclePercentage: 0.5); pwm.Start(); Console.ReadLine(); Console.WriteLine("App exit."); pwm.Stop();
出力波形をオシロスコープで観測してみました。
環境など
- Raspberry Pi 4 Model B 4GB
- Raspberry Pi 用の Ubuntu Server 22.04 LTS
ubuntu-22.04-preinstalled-server-arm64+raspi.img.xz
- .NET Core Runtime
aspnetcore-runtime-6.0.7-linux-arm64.tar.gz
ANYCUBIC Kobra XY限界サイズをプリントするための設定
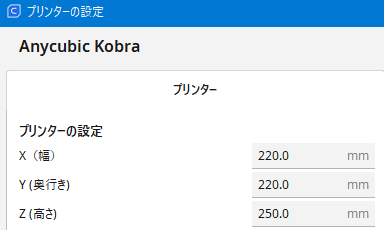
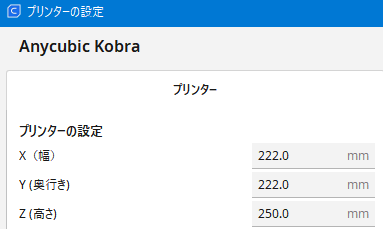
結論
X222.0, Y222.0 でうまくいきます。
Z は 250.0 でいいんじゃないでしょうか。そんなに背が高いものを作らないので、Zについては詰めません。
テスト用モデル
www.thingiverse.com これを Cura でリサイズして使います。
カタログスペック

 ※ 画像はAmazonより引用
※ 画像はAmazonより引用
X220, Y220 です。
カタログスペックのまま設定
スライス
カタログスペックで設定しても、これが限界値になるので余裕がなく使い切れません。
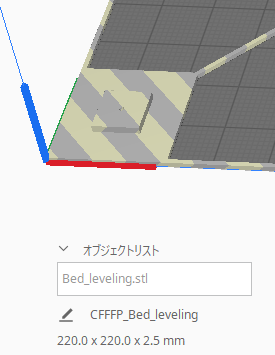
プリント
スライス可能な 218mm x 218mm でプリントした結果が以下です。
左下(原点)側にちょっとだけ寄って、上と右のスペースがちょっと広めです。

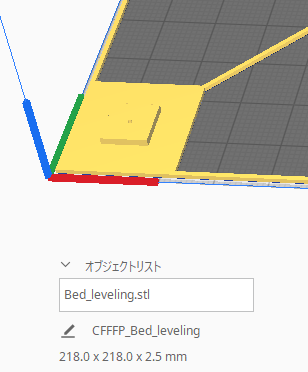
限界サイズをプリントできる設定
2mm 大きく X222.0, Y222.0 で設定します。
スライス
カタログスペックでスライスできるようになります。

プリント
220mm x 220mm でプリントした結果が以下です。
ほぼ中央に配置されるようになりました。
